Last updated 27th May 2010.
Authors
- Nicholas Chapman
- Ben Nolan
- Thomas Ludwig
- Yves Collé
Licence

This document is copyright (c) Glare Technologies 2004-2010 and licensed under a Creative Commons Attribution-Share Alike 3.0 License, you are free to share and remix this document under the terms of the licence.
Overview of this document
The Indigo scene format is a freely usable scene format for describing physically accurate 3 dimensional scenes. It has been developed in conjunction with Indigo Renderer, a physically based, unbiased raytracer. This format has been available for public use for several years, but in 2010 we decided to officially relicence the format and it’s supporting documentation under opensource licences - so that other 3D packages can use the Indigo format as they see fit.
Please not that the Indigo application is not opensourced, and software that uses the Indigo Scene Format is not required to be opensourced either. Commercial, free and opensource software may all use Indigo equally.
This document is current for Indigo Renderer version 2.4.
This document was auto converted from our original .odt file and may have formatting errors and mistakes. Feel free to clone this github repository and push any changes or fixes back to us.
Introduction to the .IGS format
Indigo scene files are stored in an XML format. The filename extension is .igs, for ‘Indigo Scene’.
Root element should be called ‘scene’.
Indigo Mesh Format
The Indigo mesh (.igmesh) format is a binary mesh format used by Indigo. See these example implementations for more details:
The layout of the format is as follows:
// uint32 is an unsigned 32 bit integer
// float is a single precision (32 bit) IEEE 754 floating point number.
// Byte order is little endian.
// bleh a[9] means that 'a' is an array of 9 'bleh's.
// Some composite structures as used below:
class Triangle
{
uint32 vertex_indices[3];
uint32 uv_indices[3];
uint32 tri_mat_index;
}
// ASCII string
class String
{
uint32 size // max length 1024
char8 data[size] // not null terminated
}
class UVSetExposition
{
String uv_set_name
uint32 uv_set_index
}
// The actual format:
uint32 magic number // should be 5456751
uint32 format_version // 1
uint32 num_uv_mappings
uint32 num_used_materials
String used_materials[num_used_materials]
uint32 num_uv_set_expositions
UVSetExposition uv_set_expositions[num_uv_set_expositions]
uint32 num_vert_positions
Vec3f vert_positions[num_vert_positions]
uint32 num_vert_normals // should either be 0 or equal to num_vert_positions
Vec3f vert_normals[num_vert_normals]
uint32 num_uv_pairs
Vec2f uv_pairs[num_uv_pairs]
uint32 num_triangles
Triangle triangles[num_triangles]renderer_settings
This element provides a means of overriding various settings from inifile.xml. This element is optional, and so are each of its children. Any setting defined here overrides the respective setting from inifile.xml.
element status:optional
width
Sets the width (horizontal resolution) of the output image.
type: integer
restrictions: must be > 0
units: pixels
default value: 600
height
Sets the height (vertical resolution) of the output image.
type: integer
restrictions: must be > 0
units: pixels
default value: 450
bih_tri_threshold
If the number of triangles in a single mesh exceeds this threshold, then a BIH will be used for intersection accleration for that mesh, otherwise a Kd-tree is used.
type: integer
restrictions: must be > 0
units: number of triangles
default value: 1100000
metropolis
Enables or disables Metropolis-Hastings sampling
type: boolean
default value: true
large_mutation_prob
Probability of selecting a large mutation type. Only used if metropolis is true.
type: scalar real
restrictions: must in range 0, 1
units: dimensionless
default value: 0.4
max_change
Radius of the perturbation mutation distribution.
type: scalar real
restrictions: must in range 0, 1
units: dimensionless
default value: 0.01
max_depth
Maximum ray bounce depth.
type: integer
restrictions: must be > 0
units: number of bounces
default value: 10000
max_num_consec_rejections
Maximum number of consecutive rejection of tentative new samples when Metropolis-Hastings transport is used. Note that any non-infinite number technically causes biased sampling.
type: integer
restrictions: must be > 0
units: number of rejections
default value: 1000
logging
If true, a log of the console output is written to log.txt
type: boolean
default value: true
bidirectional
If true, bidirectional path tracing is used to construct paths. Otherwise, backwards path tracing is used.
type: boolean
default value: true
save_untonemapped_exr
If true, an untonemapped EXR image is saved in the renders directory.
type: boolean
default value: false
save_tonemapped_exr
If true, a tonemapped EXR image is saved in the renders directory.
type: boolean
default value: false
save_igi
If true, an untonemapped Indigo Image (.igi) file is saved in the renders directory.
type: boolean
default value: false
image_save_period
The rendered image(s) will be saved to the renders directory every image_save_period seconds.
type: scalar real
restrictions: must be > 0
units: seconds
default value: 10
halt_time
If positive, indigo will halt after halt_time seconds.
type: scalar real
restrictions:
units: seconds
default value: -1
halt_samples_per_pixel
If positive, indigo will halt after halt_samples_per_pixel samples per pixel have been reached.
type: scalar real
restrictions:
units: samples / pixel
default value: -1
h ybrid
If true, direct illumination is sampled with QMC sampling, and indirect illumination with Metropolis-Hastings sampling.
type: boolean
default value: false
frame_upload_period
Period between uploads of the image buffer from slave to master when rendering in network mode.
type: scalar real
restrictions: must be > 0
units: seconds
default value: 40
auto_choose_num_threads
If true, the number of render threads used is set based on the number of logical cores detected.
type: boolean
default value: true
num_threads
Number of render threads used. This setting is only used if auto_choose_num_threads is false.
type: integer
restrictions: must be > 0
units: number of threads
default value: 1
super_sample_factor
If this factor is greater than 1, then the image is rendered at a higher resolution internally, then downsampled using the downsize filter before the render is saved to disk. This can help to reduce aliasing around high contrast edges.
Note that higher factors require more memory (RAM).
type: integer
restrictions: must be > 0
units: dimensionless
default value: 2
display_period
The internal HDR buffer is tonemapped and displayed on screen every display_period seconds.
type: scalar real
restrictions: must be > 0
units: seconds
default value: 10
ray_origin_nudge_distance
Ray origins are offset by this distance after intersection, in order to avoid false self-intersections.
type: scalar real
restrictions: must be >= 0
units: meters
default value: 1.0e-4
watermark
If true, an ‘Indigo Renderer’ logo is drawn on the bottom right hand corner of the output render.
type: boolean
default value: false
info_overlay
If true, a line of text is drawn on the bottom of each render, containing some statistics about the current render process.
type: boolean
default value: false
cache_trees
If true, kd-trees are cached to disk after construction, in the tree_cache directory.
type: boolean
default value: true
aperture_diffraction
If true, diffraction of light passing through the camera aperture is simulated.
type: boolean
default value: true
post_process_diffraction
If true, aperture_diffraction is simulated using a filter applied to the image buffer, instead of perturbation of rays. This technique is generally faster and less noisy, but slightly less accurate.
type: boolean
default value: true
render_region
If this element is present, only a certain region of the usual image is rendered.
Only pixels (x, y) such that x1 <= x < x2 and y1 <= y < y2 are rendered.
render_region::x1
X Coordinate of top left pixel of rendered region.
type: integer
restrictions: must be >= 0
units: pixels
render_region::y1
Y Coordinate of top left pixel of rendered region.
type: integer
restrictions: must be >= 0
units: pixels
render_region::x2
X Coordinate of pixel immediately to the right of rendered region.
type: integer
restrictions: x1 < x2 <= width
units: pixels
render_region::y2
Y Coordinate of pixel immediately below rendered region.
type: integer
restrictions: y1 < y2 <= height
units: pixels
render_foreground_alpha
If this is true, the output image is just a greyscale image, where the foreground is white, and the background (physical sky, env map, constant background, void background etc..) is black.
type: boolean
default value:false
splat_filter
Controls the filter used for splatting contributions to the image buffer.
Can be one of box, gaussian, or mn_cubic.
splat_filter::box
Box filter. Causes bad aliasing, don’t use :)
splat_filter::gaussian
Gaussian filter with standard deviation of 0.35 pixels.
splat_filter::mn_cubic
Mitchell-Netravali cubic filter. Good all-round filter with little aliasing.
Please refer to the paper ‘Reconstruction Filters in Computer Graphics’ by Mitchell and Netravali, 1988, for more information.
splat_filter::mn_cubic::blur
The ‘B’ parameter from the paper. Higher blur values cause more blurring of the image
type: scalar real
restrictions: will give best results in range 0, 1
units: dimensionless
default value: 0.6
splat_filter::mn_cubic::ring
The ‘C’ parameter from the paper. Higher ring values cause more ‘ringing’. (alternating bands of black and white around high contrast edges).
Note that Mitchell and Netravali recommend choosing B and C such that 2C + B = 1.
type: scalar real
restrictions: will give best results in range 0, 1
units: dimensionless
default value: 0.2
downsize_filter
Controls the filter used for downsizing super-sampled images.
Only used when super_sample_factor is greater than one.
Takes exactly the same parameters as splat_filter.
Example XML for renderer_settings:
<renderer_settings>
<metropolis>true</metropolis>
<bidirectional>true</bidirectional>
<width>800</width>
<height>600</height>
<downsize_filter>
<mn_cubic>
<ring>0.2</ring>
<blur>0.6</blur>
</mn_cubic>
</downsize_filter>
<splat_filter>
<gaussian/>
</splat_filter>
<super_sample_factor>2</super_sample_factor>
<aperture_diffraction>true</aperture_diffraction>
<post_process_diffraction>true</post_process_diffraction>
</renderer_settings>background
Illuminates scene with a uniform environment light.
element status: optional
Must have exactly one ‘spectrum’ child element.
example xml:
<background>
<spectrum>
<blackbody>
<temperature>3500</temperature>
<gain>1.0</gain>
</blackbody>
</spectrum>
</background>skylight

element status: optional
sundir
The sundir element defines the 3-vector direction towards the sun. the Z axis is up, e.g. (0,0,1) places the sun directly overhead. Need not be normalised
type: real 3-vector
restrictions: z component must be > 0
units: dimensionless
turbidity
The turbidity defines the haziness/clearness of the sky. Lower turbidity means a clearer sky. Should be set to something between 2 and ~5.
type: scalar real
restrictions: > 0
units: dimensionless
extra_atmospheric
If extra_atmospheric is true, then the skylight is computed as if it was outside the atmosphere.
This means that the sun spectrum is not attenuated by atmospheric scattering, and the sky will be black, since
there is no atmospheric scattering.
Element status: optional
type: boolean
default:false
xml example:
<skylight>
<sundir>0 0.6 1</sundir>
<turbidity>2</turbidity>
</skylight> env_map

Illuminates scene with a HDR environment map.
Currently Indigo can load two types of environment maps.
The first type is .exr maps in lat-long format:
env_map :: lat_long
env_map :: lat_long :: path
The path to the .exr file.
type: string
restrictions: must be a valid path
units:
env_map :: lat_long :: gain
The map is scaled by this factor when it is loaded.
type: scalar real
restrictions: > 0
units: dimensionless
The second type of Env map supported by Indigo is .float maps in spherical format. .float is a simple format exported by the HDR Shop program, with 3 32bit floats per pixel, one per colour channel, and no other information in the file.
env_map :: spherical
env_map :: spherical :: path
The path to the .exr file.
type: string
restrictions: must be a valid path
units:
env_map :: spherical :: width
The width of the map. Must be equal to the height
type: scalar integer
restrictions: > 0
units: pixels
env_map :: spherical :: gain
The map is scaled by this factor when it is loaded.
type: scalar real
restrictions: > 0
units: dimensionless
Example XML:
<env_map>
<spherical>
<path>probes/kitchen_probe.float</path>
<width>640</width>
<gain>0.9</gain>
</spherical>
<!--latlong>
<path>probes/skylight-day.exr</path>
<gain>1.0</gain>
</latlong-->
</env_map>Tonemapping
The tonemapping element should have one child element, either ‘linear’, ‘reinhard’, or ‘camera’.
element status: required
tonemapping :: linear
tonemapping :: linear :: scale
A constant by which the pixel values are multiplied.
type: scalar real
restrictions: >= 0
units: dimensionless
tonemapping :: reinhard
tonemapping :: reinhard :: pre_scale
type: scalar real
restrictions: >= 0
units: dimensionless
tonemapping :: reinhard :: post_scale
This scaling factor is applied after the rest of the tone mapping stages. By default, the pixel with max luminance is mapped to white, so setting this scale to > 1 will result in pixels with less luminance being mapped to white. example:
type: scalar real
restrictions: >= 0
units: dimensionless
tonemapping :: reinhard :: burn
Determines the luminance at which clipping occurs.
A smaller value means more severe burn, no burn will occur in the limit as the value goes to infinity.
element status: optional
type: scalar real
restrictions: > 1
units: dimensionless
default value: 10
tonemapping :: camera
Camera tone mapping is an attempt to model the image generation process of a digital camera, and shares some parameters with a real camera.
The response function uses data from
http://www1.cs.columbia.edu/CAVE/software/softlib/dorf.php
, as such many cameras should be able to be modelled.
tonemapping :: camera :: response_function_path
Path to response function data file, e.g. ‘data/camera_response_functions/dscs315.txt’
Path can be absolute or relative; if relative, it is taken relative to the Indigo executable base path.
type: string
restrictions:
units:
tonemapping :: camera :: ev_adjust
ev_adjust is exposure-value adjustment; increasing this value by 1 will effectively double the ‘sensor output’.
type: real scalar
restrictions:
units: dimensionless
tonemapping :: camera :: film_iso
film speed (film ISO) has much the same effect as ev_adjust, except it’s a linear factor. Doubling the film ISO will double the ‘sensor output’.
type: real scalar
restrictions: must be > 0
units: dimensionless
xml example:
<tonemapping>
<reinhard>
<pre_scale>1.0</pre_scale>
<post_scale>1.0</post_scale>
</reinhard>
</tonemapping> Camera
element status:required
pos
Defines the position of the camera.
type: real 3-vector
restrictions:
units: meters
up
Defines the up vector of the camera. This and the forwards vector uniquely determine the right vector. Need not be normalised.
type: real 3-vector
restrictions:
units: dimensionless
forwards
Defines the forwards vector of the camera, i.e. which direction it is facing. Need not be normalised.
type: real 3-vector
restrictions:
units: dimensionless
aperture_radius
Defines the radius of the camera aperture. Larger radius means more depth of field.
If a non-circular aperture is used, then aperture_radius defines the half-width of the rectangle in which the aperture shape is defined.
type: scalar real
restrictions: Must be greater than zero.
units: meters
focus_distance
Distance from the camera, along the camera forwards direction, to the focal plane. Objects lying on the focal plane will be in focus. Value not used if autofocus is set.
type: scalar real
restrictions: Must be greater than zero.
units: meters
aspect_ratio
Influences the directions in which rays are traced. Should be set to the image width divided by the image height.
type: scalar real
restrictions: Must be greater than zero.
units: dimensionless
sensor_width
Width of the sensor element of the camera. A reasonable default is 0.036. (36mm)
Determines the angle of view (FOV), together with the lens_sensor_dist.
type: scalar real
restrictions: Must be greater than zero.
units: meters
lens_sensor_dist
Distance from the camera sensor to the camera lens. A reasonable default is 0.02. (20mm)
type: scalar real
restrictions: Must be greater than zero.
units: meters
white_balance
Sets the white balance of the camera.
Possible values are D50, D55, D65 etc.. all the illuminants from http://en.wikipedia.org/wiki/White_point are supported.
What’s this for?
Well lets say you’re rendering a room illuminated by a 5000K blackbody emitter. In real life, your eyes would adjust to the lighting conditions, and you would perceive the light as white. The same would occur in a room lit by a 6500K blackbody emitter. A whitebalance setting allows the camera to adjust in the same way that the eyes do. So if you set the white balance to D50 and render the room with a 5000K emitter, the light should appear white. If you set the white balance to D65 it will come out kinda orange. The D65 white point is designed for outdoors and is a good general setting to use if you’re not sure what to use.
type: string
restrictions: Must be one of ‘D65’, ‘D50’, ‘E’ etc..
exposure_duration
How long the exposure will be. The longer the exposure duration, the greater the light energy registered by the sensor.
type: scalar real
restrictions: Must be greater than zero.
units: seconds
autofocus
If this (empty) element is present, a ray will be traced from the camera position in the camera forwards direction. The camera focus distance will then be set to the distance the ray travels before striking an object, or to infinity if no object is hit.
Element status: optional
obstacle_map
If this element is present, then an obstacle map texture is used when calculating the diffraction though the camera aperture.
An obstacle map will only have an effect if aperture_diffraction is enabled.
Path must be relative to the scene working directory.
Element status: optional
type: string
aperture_shape
If the aperture_shape element is not present, then a default circular aperture shape is used.
Note that a preview of the final aperture shape will be saved in the working directory as aperture_preview.png.
Element status: optional
aperture_shape::circular
Makes the camera use a circular shaped aperture.
aperture_shape::image
Allows the aperture shape to be loaded from an image file.
aperture_shape::image::path
The path to the aperture image file.
The image must be of PNG format.
The image is interpreted as a greyscale image.
The image must be square, and have power-of-two dimensions of at least 512 x 512.
White portions of the image are interpreted as transparent, and black parts of the image are interpreted as stopping light.
The white part of the aperture image should be as large as possible (i.e. It should just touch the edges of the square image), to allow for efficient sampling.
Path must be relative to the scene working directory.
type: string
aperture_shape::generated
Allows the aperture shape to be defined using a few parameters. See the attached digram for more information.
aperture_shape::generated::num_blades
Number of diaphragm blades.
type: integer
restrictions: Must be >= 3
units: dimensionless
aperture_shape::generated::start_angle
Initial angle of first diaphragm blade.
type: scalar real
restrictions:
units: radians
aperture_shape::generated::blade_offset
Distance from center of aperture shape to edge of diaphragm.
type: scalar real
restrictions: must be > 0
units: fraction of aperture shape width
aperture_shape::generated::blade_curvature_radius
Distance from edge of diaphragm to effective center of diaphragm curvature circle.
type: scalar real
restrictions: must be > 0
units: fraction of aperture shape width
Camera element example XML:
<camera>
<pos>0 -2 1</pos>
<up>0 0 1</up>
<forwards>0 1 0</forwards>
<aperture_radius>0.001</aperture_radius>
<focus_distance>3.0</focus_distance>
<aspect_ratio>1.33</aspect_ratio>
<sensor_width>0.036</sensor_width>
<lens_sensor_dist>0.02</lens_sensor_dist>
<white_balance>E</white_balance>
<autofocus/>
</camera> Materials
Texture
The final, used value for each component is calculated like so:
f(x) = ag(x)2 + bg(x) + c
and
g(x) = xexponent
Where x is the colour component from the map (e.g. The greyscale value or one of the R, G, B), normalised to 0, 1,
f(x) is the final used value, and a, b, c, and exponent are as described below.
In the case where are scalar value is required from a RGB map, for example when using a bump map,
the final value is calculated as (f(r) + f(g) + f(b)) / 3
Supported texture formats:
JPEG (.jpg, .jpeg): greyscale, RGB supported.
PNG (.png): greyscale (8 or 16 bits per pixel) , RGB (24 or 48 bits per pixel) supported. Note that 16 bits per channel data will be internally converted to 8 bits per channel data.
Truevision TGA (.tga): greyscale (8 bits per pixel) or RGB (24 bits per pixel) supported. RLE compression is not supported.
Windows Bitmap (.bmp): greyscale (8 bits per pixel) or RGB (24 bits per pixel) supported. RLE compression is not supported.
Open EXR (.exr)
TIFF (.tif / .tiff):greyscale, RGB, RGBA supported.
texture::uv_set
Name of the set of uv coordinates used for texture lookup.
type: string
restrictions: must be a uv set that has been exported by a mesh, if the material is used on that mesh.
units:
texture::path
Path to the texture on disk. Path must be absolute or relative to the scene working directory.
type: string
texture::exponent
Used for converting texture RGB values to display values. A typical value is thus 2.2.
type: scalar real
restrictions: must be > 0
units: dimensionless
texture::a
’a’ coefficient for quadratic texture function.
Element status: optional
texture::b
’b’ coefficient for quadratic texture function.
Element status: optional
texture::c
’c’ coefficient for quadratic texture function.
Element status: optional
texture::tex_coord_generation
Determines how texture coordinates are generated.
texture::tex_coord_generation::uv
Texture coordinates will be generated by multiplying the geometry uv coordinates by an affine transformation.
texture::tex_coord_generation::uv::matrix
A 2x2 matrix that is multiplied with the geometry uv coordinates.
texture::tex_coord_generation::uv::translation
A 2-vector that specifiies a translation.
example xml:
<texture>
<uv_set>albedo</uv_set>
<path>__55_Chevy_by_marpo3.jpg</path>
<exponent>2.2</exponent>
<tex_coord_generation>
<uv>
<matrix>1 0 0 1</matrix>
<translation>0.5 0.5</translation>
</uv>
</tex_coord_generation>
texture>material
Defines a material.
A material element must have one child element called ‘name’, and another element which can be either ‘specular’, ‘phong’, or ‘diffuse’ etc..
material :: name
The name of the material
type: string
restrictions:
units:
diffuse
Diffuse is a Lambertian diffuse material.
{text:reference-mark} {text:reference-mark} albedo
Sets the reflectance (albedo)
Values will be clamped to the range 0, 1.
Type: wavelength-dependent material parameter.
units: dimensionless
bump
The bump map is used to perturb the shading normal of the surface.
element_status: optional
type: displacement material parameter.
units: meters
displacement
The displacement distance in meters that mesh vertices are displaced along the shading normal.
element_status: optional
type: displacement material parameter.
units: meters
base_emission
The spectral radiance emitted from this material surface.
Values will be clamped to 0, infinity)
element_status: optional
type: wavelength-dependent material parameter.
units: W m-3 sr-1
emission
Modulates the base_emission value: the final emitted spectral radiance is calculated as the product of base_emission and emission.
Values will be clamped to 0, infinity)
element_status: optional
type: wavelength-dependent material parameter.
Units: dimensionless
layer
Defines the index of the layer that light emitted from this material will be drawn to. The index is zero-based.
element_status: optional
type: integer
default: 0
example xml:
<material>
<name>mat1</name>
<diffuse>
<texture>
<uv_set>albedo</uv_set>
<path>indigo_logo.png</path>
<exponent>2.2</exponent>
</texture>
<base_emission>
<constant>
<rgb>
<rgb>
2000000000 2000000000 2000000000
</rgb>
<gamma>1</gamma>
</rgb>
</constant>
</base_emission>
</diffuse>
</material>specular
Specular is a material that can be both a perfect specular reflector and a perfect specular transmitter.
internal_medium_name
Should be the name of a medium already defined in the scene file.
type: {text:reference-ref} {text:reference-ref} string
unit:
restrictions:
transparent
true or false. If true, light can be transmitted, if not, only reflected light is simulated.
type: boolean
bump
See diffuse::bump
displacement
See diffuse::displacement
base_emission
See diffuse::base_emission
emission
See diffuse::emission
layer
See diffuse::layer
xml example:
<specular>
<transparent>true</transparent>
<internal_medium_name>glass</internal_medium_name>
</specular> phong

Phong is a physically based glossy reflection model using a Phong lobe. It has a Lambertian diffuse substrate.
diffuse_albedo
The reflectance of the diffuse substrate.
Values will be clamped to the range 0, 1.
type:wavelength-dependent material parameter**
units: dimensionless
ior
Index of refraction of the dielectric coating or substance making up the material.
type: real scalar
units: dimensionless
restrictions:>= 1**
exponent
Sets the exponent of the Phong lobe controlling specular reflection. Higher exponent means more ‘perfect’ reflection, lower exponent leads to more glossy+diffuse highlights. Can range from ~1 to up to 10000 or more.
type:wavelength-independent material parameter**
units: dimensionless
restrictions:Must be greater than zero.
nk_data

use measured complex IOR data to compute the reflection at various angles.
If nk_data is specified, then the diffuse and specular elements are not taken into account.
The value of the nk_data element should be a path to a .nk file, e.g. ‘nkdata/au.nk’
element status:optional
type: string
restrictions:Must be a valid path to a .nk file. Path should be a relative path from Indigo root directory.
specular_reflectivity
The specular reflectivity at normal incidence.
If this element is present, then the specular reflectivity at various angles is based on these values.
If this element is present, then the diffuse albedo of the material is set to zero, therefore, if this element is present, only metals can be simulated.
If this element is present, then the ior and diffuse_albedo elements are ignored.
Values will be clamped to lie in the range 0, 1
type:wavelength-dependent material parameter**
units: dimensionless
bump
See diffuse::bump
displacement
See diffuse::displacement
base_emission
See diffuse::base_emission
emission
See diffuse::emission
layer
See diffuse::layer
xml example:
<material>
<name>phong1</name>
<phong>
<ior>1.5</ior>
<exponent>
<constant>
10.0
</constant>
</exponent>
<diffuse_albedo>
<constant>
<uniform>
<value>0.3</value>
</uniform>
</constant>
</diffuse_albedo>
</phong>
</material>or
<material>
<name>aluminium</name>
<phong>
<nk_data>nkdata/al.nk</nk_data>
<exponent>
<constant>1000</constant>
</exponent>
</phong>
</material>or
glossy_transparent
surface of a transparent dielectric medium. It’s good for simulating stuff like frosted glass, human skin etc…
internal_medium_name
Should be the name of a medium already defined in the scene file.
type: string
exponent
See phong::exponent
bump
See diffuse::bump
displacement
See diffuse::displacement
base_emission
See diffuse::base_emission
emission
See diffuse::emission
layer
See diffuse::layer
XML example:
<material>
<name>frosty_glass</name>
<glossy_transparent>
<internal_medium_name>glass</internal_medium_name>
<exponent>
<constant>1000</constant>
</exponent>
</glossy_transparent>
</material>diffuse_transmitter
materials
This material is a very simple BSDF that basically scatters incoming light into the opposite hemisphere, with a cosine-weighted distrubution. Although it doesn’t really have any exact physical basis, it could be thought of as the limit of many sub-surface scatters inside a thin, highly scattering material. As such it should be useful for simulating such materials as curtains, lampshades etc.. It’s meant to be used on single-layer geometry, and it does not have an associated internal medium (it’s not an interface material).
It will probably be a good idea to blend this material with a diffuse or phong material, so that some backscattered light is visible, not just transmitted light.
albedo
Sets the transmission fraction (albedo)
Values will be clamped to the range 0, 1.0.
Type: wavelength-depenedent material parameter
units: dimensionless
displacement
See diffuse::displacement
base_emission
See diffuse::base_emission
emission
See diffuse::emission
layer
See diffuse::layer
xml example:
<material>
<name>diff_tran</name>
<diffuse_transmitter>
<texture>
<uv_set>albedo</uv_set>
<path>ColorChecker_sRGB_from_Ref.jpg</path>
<exponent>2.2</exponent>
</texture>
<albedo>
<texture>
<texture_index>0</texture_index>
</texture>
</albedo>
</diffuse_transmitter>
</material>blend

with the weighting factor a given constant, or controlled by an image map.
More than two materials can be blended, by using a hierarchical arrangement of blend materials.
There is one restriction that applies to what materials can be blended together (in the same blend tree composed of one or more blend materials) – At most one constituent material can be a BSDF containing a delta distribution. Materials with delta distributions are the specular and null_material material types.
blend
Controls the fraction of each constituent material used.
Will be clamped to 0, 1
type: wavelength-independent material parameter
units: dimensionless
step_blend
If step_blend is true, then the blend parameter will have the following step function applied to it:
f(x) = 1 if x >= 0.5, else 0
Enabling step blend is recommended when using a texture as a ‘clip mask’, in order to reduce noise.
type: boolean
default:false**
a_name
Name of constituent material a.
type: string
b_name
Name of constituent material b.
type: string
xml example:
<material>
<name>mata</name>
<phong>
<ior>3</ior>
<diffuse>1 0 0</diffuse>
<exponent>10000</exponent>
<bump_map>
<uv_set>bump</uv_set>
<path>indigo.jpg</path>
<b>0.003</b>
<exponent>1.0</exponent>
</bump_map>
</phong>
</material>
<material>
<name>matb</name>
<diffuse>
<colour>0 1 0</colour>
<bump_map>
<uv_set>bump</uv_set>
<path>spherebump.jpg</path>
<b>0.1</b>
<exponent>1.0</exponent>
</bump_map>
</diffuse>
</material>
<material>
<name>blendmat</name>
<blend>
<a_name>a</a_name>
<b_name>b</b_name>
<texture>
<uv_set>albedo</uv_set>
<path>checker.jpg</path>
<exponent>1.0</exponent>
</texture>
<blend>
<texture>
<texture_index>0</texture_index>
</texture>
</blend>
</blend>
</material>null_material
The null material is a very simple material that doesn’t scatter light at all. It’s effectively invisible.
The null material has no parameters.
Xml example:
<material>
<name>b</name>
<null_material/>
</material>oren_nayar
no specular reflection.
It’s appropriate for materials like clay, sprayed concrete, porous rock, Moon surface, etc..

Render by Zom-B, model from The Stanford 3D Scanning Repository
sigma
Controls the roughness of the material. A higher sigma gives a rougher material with more backscattering.
Standard deviation of the microfacet groove slope angles.
Values will be clamped to 0, infinity)
type: wavelength-independent material parameter
units: radians
albedo
See diffuse::albedo
bump
See diffuse::bump
displacement
See diffuse::displacement
base_emission
See diffuse::base_emission
emission
See diffuse::emission
layer
See diffuse::layer
Xml example:
<material>
<name>3</name>
<oren_nayar>
<albedo>
<constant>
<uniform>
<value>0.7</value>
</uniform>
</constant>
</albedo>
<sigma>
<constant>0.2</constant>
</sigma>
</oren_nayar>
</material>Medium
medium
Defines a new medium. A medium has a type (much like material have types).
Media types include basic, epidermis, and dermis.
name
Name of the medium. Used when specifying the internal_medium_name in specular etc.. materials.
type:string**
unit:
restrictions:
precedence
Precedence is used to determine which medium is considered to occupy a volume when two or more media occupy the volume. The medium with the highest precedence value is considered to occupy the medium, ‘displacing’ the other media.
The predefined and default scene medium, ‘air’, has precedence 1.
type:integer**
unit:
restrictions:Should be > 1
medium::epidermis
Medium for simulating the outer layer of skin.
See Jensen and Donner’s paper for more details and example values.
http://graphics.ucsd.edu/papers/egsr2006skin/egsr2006skin.pdf
melanin_fraction
Fraction of melanin present in tissue.
Typical range: 0 – 0.5
type:real scalar**
unit: dimensionless
restrictions:Should be in range 0, 1
melanin_type_blend
Controls the amount of eumelanin relative to pheomelanim in the tissue.
Typical range: 0 - 1
type:real scalar**
unit: dimensionless
restrictions:Should be in range 0, 1
medium::dermis
hemoglobin_fraction
Controls the amount of hemoglobin present.
Typical range: 0.001 – 0.1
type:real scalar**
unit: dimensionless
restrictions:Should be in range 0, 1
medium::basic
ior
Index of refraction. Should be >= 1.
Glass has an IOR (index of refraction) of about 1.5, water about 1.33.
The IOR of plastic varies, 1.5 would be a reasonable guess.
type: scalar real
unit: dimensionless
restrictions: >= 1
cauchy_b_coeff
Sets the ‘b’ coefficient in Cauchy’s equation, which is used in Indigo to govern dispersive refraction. Units are micrometers squared. Setting to 0 disables dispersion. Note: the render can be slower to converge when dispersion is enabled, because each ray refracted through a dispersive medium can represent just one wavelength. So only set cauchy_b_coeff != 0 if you really want to see dispersion :)
Typical values for glass and water lie in the range 0.003 – 0.01
(see http://en.wikipedia.org/wiki/Cauchy%27s_equation for some coefficients)
type:scalar real
unit: micrometers2
restrictions:Should be >= 0 for physical correctness
absorption_coefficient_spectrum
Controls the rate at which light is absorbed as it passes through the medium.
type:spectrum element**
unit: meter-1
restrictions:Should be >= 0 for physical correctness
subsurface_scattering
Use this element to make the medium scatter light as it passes through it.
element status: optional
subsurface_scattering::scattering_coefficient_spectrum
type:spectrum element**
unit: meter-1
restrictions:Should be >= 0 for physical correctness
subsurface_scattering:: phase_function
Chooses the phase function used for the scattering.
Should contain one phase_function element (see below).
type:phase function element**
xml example:
<medium>
<name>scattering_medium</name>
<ior>1.5</ior>
<cauchy_b_coeff>0.0</cauchy_b_coeff>
<absorption_coefficient_spectrum>
<rgb>
<rgb>10000.0 5 5</rgb>
</rgb>
</absorption_coefficient_spectrum>
<subsurface_scattering>
<scattering_coefficient_spectrum>
<uniform>
<value>10</value>
</uniform>
</scattering_coefficient_spectrum>
<phase_function>
<uniform/>
</phase_function>
</subsurface_scattering>
</medium>Phase Function
The phase function controls in what direction light is scattered, when a scattering event occurs.
Must be one of:
uniform
Takes no parameters
xml example:
<phase_function>
<uniform/>
</phase_function> henyey_greenstein
The Henyey-Greenstein phase function can be forwards or backwards scattering, depending on the ‘g’ parameter.
henyey_greenstein::g_spectrum
The g parameter may vary with wavelength, and is therefore specified using a spectrum element.
Spectrum values will be silently clamped to -0.99, 0.99 .
type: spectrum element
units: dimensionless (average cosine of phase function scattering angle)
restrictions: spectrum values should lie in range -1, 1
xml example:
<phase_function>
<henyey_greenstein>
<g_spectrum>
<uniform>
<value>0.9</value>
</uniform>
</g_spectrum>
</henyey_greenstein> REXML could not parse this XML/HTML: </phase_function>
Spectrum
Should have exactly one child, either peak, blackbody, rgb, or uniform.
spectrum::peak
spectrum::peak::peak_min
The wavelength in nm of the start of the spectrum peak.
type: real scalar
units: nanometers
restrictions: < peak_max
spectrum::peak::peak_width
The width of the spectrum peak, in nm.
type: real scalar
units:nanometers
restrictions:> 0
spectrum::peak::base_value
Exitant radiance for wavelengths outside the peak part of the spectrum.
type: real scalar
units: spectral radiance, W m-3 sr-1
restrictions: >= 0
spectrum::peak::peak_value
Exitant radiance for wavelengths inside the peak part of the spectrum.
type:real scalar
units: spectral radiance, W m-3 sr-1
restrictions: >= 0
spectrum::blackbody
spectrum::blackbody::temperature
type:real scalar
units: Kelvin
restrictions: > 0
spectrum::blackbody::gain
Exitant radiance is scaled by this
type:real scalar
units:dimensionless
restrictions:> 0
spectrum::rgb
spectrum::rgb::rgb
type:real 3-vector
units: spectral radiance, W m-3 sr-1
spectrum::rgb::gamma
The gamma value is used to convert rgb values from image values into intensity-linear display values.
The rgb components are raised by this exponent.
Use 2.2 as a suitable default.
type:real scalar**
units: dimensionless
restrictions: must be > 0
spectrum::uniform
spectrum::uniform::value
type:real scalar
units: spectral radiance, W m-3 sr-1
spectrum::regular_tabulated
Allows nearly abitrary spectra to be defined. The spectrum value is given at regular wavelength intervals, and linear interpolation is used to sample at intermediate wavelengths.
spectrum::regular_tabulated::start_wavelength
Wavelength of the first spectrum value.
type:real scalar
units:meters.
spectrum::regular_tabulated::end_wavelength
Wavelength of the last spectrum value.
type:real scalar
units:meters.
spectrum::regular_tabulated::num_values
Number of tabulated values
type:integer**
units:
xml example:
<material>
<name>mat1</name>
<diffuse>
<albedo_spectrum>
<regular_tabulated>
<start_wavelength>0.4E-06</start_wavelength>
<end_wavelength>0.7E-06</end_wavelength>
<num_values>10</num_values>
<values>
1 0.9 0.5 0.345 0 0 0 0 0 0
</values>
</regular_tabulated>
</albedo_spectrum>
</diffuse>
</material> wavelength-dependent material parameter
A wavelength-dependent material parameter may either by constant, in which case it does not vary spatially, or it may be controlled by a texture, or it may be controlled by a shader.
A wavelength-dependent material parameter element must have exactly one child element, with the name ‘constant’, ‘texture’, or ‘shader’.
constant
Aconstant** wavelength-dependent material parameter defines a material parameter that does not vary spatially. However, it can still vary with wavelength, so therefore a spectrum element is used to define the parameter.**
Type:spectrum element**
units:depends on context**
texture
Atexture** wavelength-dependent material parameter defines a material parameter that is controlled by a texture map.**
texture::texture_index
type:integer**
restrictions: must be the 0-based index of a texture defined in the current material.
shader
Ashader** wavelength-dependent material parameter defines a material parameter that is controlled by a shader program.**
For a wavelength-dependent material parameter, a shader program can be defined two different ways. In the first way, the shader is executed once for each wavelength. This allows the most control when creating wavelength-dependent parameters.
To define a shader in this way, you must define a function called ‘eval’ with signature and return type:
**eval(real wavelen, vec3 pos) real **
In the second way, the shader is executed only once for all wavelengths, and returns a RGB 3-vector, that is in turn converted into a spectrum internally in Indigo.
To define a shader in this way, you must define a function called ‘eval’ with signature and return type:
**def eval(vec3 pos) vec3**shader::shader
type:string**
restrictions: must define a valid shader program.
wavelength-independent material parameter
A wavelength-independent material parameter may either by constant, in which case it does not vary spatially, or it may be controlled by a texture, or it may be controlled by a shader.
A wavelength-independent material parameter element must have exactly one child element, with the name ‘constant’, ‘texture’, or ‘shader’.
constant
Aconstant** wavelength-independent material parameter defines a material parameter that does not vary spatially.**
Type:real scalar**
units:depends on context**
texture
Atexture** wavelength-independent material parameter defines a material parameter that is controlled by a texture map.**
texture::texture_index
type:integer**
restrictions: must be the 0-based index of a texture defined in the current material.
shader
Ashader** wavelength-independent material parameter defines a material parameter that is controlled by a shader program.**
To define a shader in this way, you must define a function called ‘eval’ with signature and return type:
**def eval(vec3 pos) real **
shader::shader
type:string**
restrictions: must define a valid shader program.
displacement material parameter
A displacement material parameter may either by constant, in which case it does not vary spatially, or it may be controlled by a texture, or it may be controlled by a shader.
A displacement material parameter element must have exactly one child element, with the name ‘constant’, ‘texture’, or ‘shader’.
constant
Type:real scalar**
units:depends on context**
texture
Atexture** displacement material parameter defines a material parameter that is controlled by a texture map.**
texture::texture_index
type:integer**
restrictions: must be the 0-based index of a texture defined in the current material.
shader
Ashader** displacement material parameter defines a material parameter that is controlled by a shader program.**
To define a shader in this way, you must define a function called ‘eval’ with signature and return type:
**def eval() real **
shader::shader
type:string**
restrictions: must define a valid shader program.
rectanglelight
The rectangle light element defines a horizontal area light with normal (0,0,-1).
pos
The (x, y, z) position of the middle of the rectangle area light.
type:real 3-vector
units:meters
restrictions:
width
Width in x direction.
type:real scalar
units:meters
restrictions: > 0
height
Width in y direction.
type:real scalar
units:meters
restrictions:> 0
spectrum
Emission spectrum for the rectangle light; spectrum element is described above
type:spectrum element**
efficacy_scale
The efficacy_scale element allows light sources of a given wattage and efficacy to be simulated.
The efficacy_scale element is optional, if it is used, it overrides the gain. Otherwise the gain works as
normal.
The overall luminous efficiacy is the luminous flux per Watt of power drawn.
There are some values on the wikipedia page http://en.wikipedia.org/wiki/Luminous_efficacy
element status: optional
efficacy_scale::power_drawn
Power drawn by the light source, e.g. 100 Watts
type:real scalar
units:Watts**
restrictions:> 0
efficacy_scale::overall_luminous_efficiacy
The overall luminous efficiacy is the luminous flux per Watt of power drawn.
type:real scalar
units:Lumens per Watt (lm/W)**
restrictions:> 0
example xml:
<rectanglelight>
<pos>0.0 0 1.9</pos>
<width>0.2</width>
<height>0.2</height>
<spectrum>
<peak>
<peak_min>300</peak_min>
<peak_width>550</peak_width>
<base_value>0</base_value>
<peak_value>200</peak_value>
</peak>
</spectrum>
<efficiacy_scale>
<power_drawn>100</power_drawn>
<overall_luminous_efficiacy>17.5</overall_luminous_efficiacy>
</efficiacy_scale>
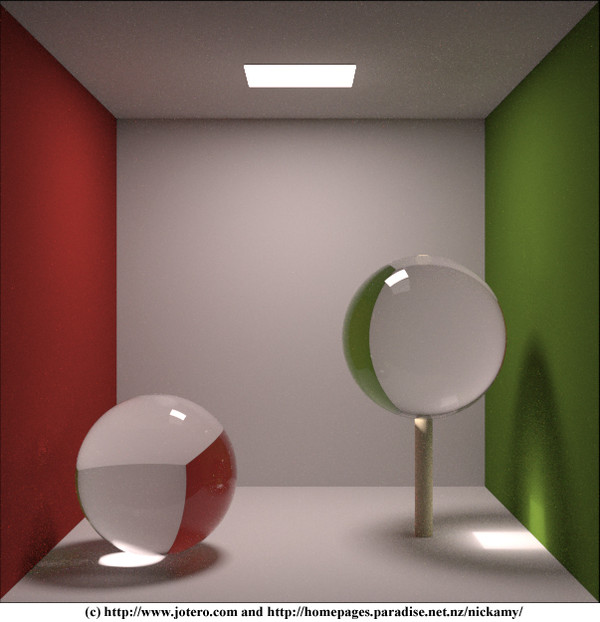
</rectanglelight> exit_portal
Exit portals are useful for speeding up the rate of convergence of interior renderings, when the interior is lit by an environmental light source, such as the sun/sky model.
Exit portals are placed over the openings between the interior and the exterior environment. These openings are the ‘portals’ in the scene.
Exit portals make the rendering process more efficient, because paths passing through such openings can be more efficiently sampled when explicity marked with an exit portal.
Requirements for exit portal usage:
-
If exit portals are present in the scene, then all openings must be covered by exit portals. In other words, all possible paths that start on the camera, and then travel through space or a transparent object, and then escape out of the scene into the environment, must be blocked by one or more exit portals.
-
The geometric normal (defined by triangle winding order) of an exit portal mesh triangle, where reachable by some path from the camera, must point into the interior of the scene. (i.e. The front side of the mesh faces should be visible by the camera)
pos
Translation applied to the mesh vertex positions, when transforming from object space into world space. This is also the origin of the object coordinated system in world coordinates.
type: real 3-vector
units: meters
restrictions:
scale
Uniform scale applied to the mesh vertex positions, when transforming from object space into world space.
type: real scalar
units:dimensionless
restrictions: > 0
rotation
Optional element that defines a linear transformation that is applied to the mesh vertex positions, when transforming from object space into world space.
Note that position vectors in Indigo are considered to be column vectors.
As of Indigo 0.9, the orthogonality requirement on this matrix has been relaxed, the matrix now must merely be invertible.
rotation :: matrix
Defines a 3x3 matrix, in row-major format.
type:real 3x3 matrix
units: dimensionless
restrictions:Must be invertible.**
mesh_name
Name of a mesh object already defined in the scene file.
type:string**
XML example:
<exit_portal>
<pos>0.591146 0.361125 0.957886</pos>
<scale>1</scale>
<rotation>
<matrix>
1.000 0.000 0.000 0.000 1.0000 0.000 0.000 0.000 1.000
</matrix>
</rotation>
<mesh_name>Plane.011</mesh_name>
</exit_portal>mesh
mesh :: name
Name of the mesh
type:string**
mesh :: scale
Scales the vertex positions.
type:real scalar
units:dimensionless**
restrictions:> 0
default value: 1.0
mesh :: normal_smoothing
Enables or disables shading normals. Shading normals are interpolated across triangles from vertex normals. If normal_smoothing is false, geometric normals are used.
type:boolean**
mesh :: max_num_subdivisions
The maximum number of subdivisions that will be performed on a triangle. The actual number of subdivisions performed will depend on other subdivision parameters.
The algorithm for deciding whether a triangle will be subdivided is as follows:
if view_dependent:
subdivide =
num_subdivs < max_num_subdivs AND
triangle in view frustrum AND
screen space pixel size > subdivide_pixel_threshold AND
(curvature >= curvature_threshold OR
displacement_error >= displacement_error_threshold)
else if not view dependent:
subdivide =
num_subdivs < max_num_subdivs AND
(curvature >= curvature_threshold OR
displacement_error >= displacement_error_threshold)
type:integer**
restrictions:>= 0
default value:0**
mesh :: subdivide_pixel_threshold
Subdivision threshold in triangle screen-space pixels.
type:scalar real**
units:screen-space pixels
restrictions:>= 0
default value:4.0
mesh :: subdivide_curvature_threshold
Subdivision curvature threshold.
type:scalar real**
units:radians
restrictions:>= 0
default value:0.1
mesh :: displacement_error_threshold
Displacement error threshold.
For example, if the displacement texture map specifies a displacement of 0.2 m in the center of a triangle, and the displacement_error_threshold is 0.1 m, then the triangle will be subdivided
type:scalar real**
units:meters
restrictions:>= 0
default value:0.1 m
mesh :: view_dependent_subdivision
If true, the position of the object relative to the camera affects how much triangles are subdivided.
type:boolean**
default value:true
mesh :: subdivision_smoothing
If true, the mesh is smoothed after subdivision takes place, i.e. Vertices are moved towards the limit surface.
type:boolean**
default value:true
mesh :: merge_vertices_with_same_pos_and_normal
If true, all vertices sharing the same position and normal are merged, meaning that triangles adjacent to the pre-merge vertices are subsequently considered adjacent.
type:boolean**
default value:true
mesh :: external
An external mesh type allows a mesh defined in another file to be loaded and used.
mesh :: external :: path
Path to mesh data file.
Path can be absolute or relative. If relative, it is take as relative to the scene file base path.
Allowed file types are .obj, .3ds, and .ply, .igmesh.
type:string**
mesh :: embedded
An embedded mesh type allows the mesh to be defined directly in the .igs file.
mesh :: embedded :: expose_uv_set
Names a given index of uv (texture) coordinate information. Materials can then bind to the uv coordinates using the given name.
mesh :: embedded :: expose_uv_set :: index
Index of the uv coordinates as defined in the embedded mesh data.
type:integer**
restrictions: must be >= 0, must be < than the total number of uv coordinates defined in the mesh data.**
unit: dimensionless
mesh :: embedded :: expose_uv_set :: name
Name with which the uv set will be exposed to the materials.
type:string**
restrictions:
unit:
mesh :: embedded :: vertex
Defines a single vertex.
mesh :: embedded :: vertex :: pos (attribute)
Position of the vertex, in the local coordinate system of the mesh
type:real 3-vector**
restrictions:
unit: meters
mesh :: embedded :: vertex :: normal (attribute)
Normal of the vertex, in the local coordinate system of the mesh
type:real 3-vector**
restrictions: vector must be normalised (have length ~= 1.0)**
unit: meters
mesh :: embedded :: vertex :: uvN (attribute)
N-th uv coordinates. N must be >= 0 and <= 3.
type:real 2-vector**
restrictions:
unit: normalised texture coordinates.
mesh :: embedded :: triangle_set
Defines a group of triangles sharing a common material.
mesh :: embedded :: triangle_set :: material_name
Name of the material triangles in this group will use.
type:string**
restrictions:must be the name of an already-defined material.**
Unit:
mesh :: embedded :: triangle_set :: tri
Defines a single triangle in terms of its constituent vertices, as a 3-vector of vertex indices.
The indices index into the vertices already defined in the current mesh.
type:integer 3-vector**
restrictions:each vertex index must be >= 0 and < the total number of vertices already defined for the current mesh.**
unit:
Xml example of an external mesh:
<mesh>
<name>hand</name>
<normal_smoothing>false</normal_smoothing>
<scale>0.0005</scale>
<external>
<path>..\hand\gipshand2-273k.obj</path>
</external>
</mesh>An example of an internally defined mesh:
<mesh>
<name>mesh1</name>
<normal_smoothing>false</normal_smoothing>
<embedded>
<expose_uv_set>
<index>0</index>
<name>albedo</name>
</expose_uv_set>
<expose_uv_set>
<index>0</index>
<name>bump</name>
</expose_uv_set>
<vertex pos="-10 -10 0" normal="0 0 1" uv0="0 0" />
<vertex pos="-10 10 0" normal="0 0 1" uv0="0 10" />
<vertex pos="10 10 0" normal="0 0 1" uv0="10 10" />
<vertex pos="10 -10 0" normal="0 0 1" uv0="10 0" />
<triangle_set>
<material_name>white</material_name>
<tri>0 1 2</tri>
<tri>0 2 3</tri>
</triangle_set>
<vertex pos="-10 3 0" normal="0 -1 1" uv0="0 0" />
<vertex pos="-10 3 20" normal="0 -1 1" uv0="0 10" />
<vertex pos="10 3 20" normal="0 -1 1" uv0="10 10" />
<vertex pos="10 3 0" normal="0 -1 1" uv0="10 0" />
<triangle_set>
<material_name>checker</material_name>
<tri>4 5 6</tri>
<tri>4 6 7</tri>
</triangle_set>
</embedded>
</mesh>model
Places a mesh instance into the scene.
pos
Translation applied to the model vertex positions, when transforming from object space into world space. This is also the origin of the object coordinated system in world coordinates.
type: real 3-vector
units: meters
restrictions:
scale
Uniform scale applied to the model vertex positions, when transforming from object space into world space.
type: real scalar
units:dimensionless
restrictions: > 0
rotation
Optional element that defines a linear transformation that is applied to the model vertex positions, when transforming from object space into world space.
Note that position vectors in Indigo are considered to be column vectors.
As of Indigo 0.9, the orthogonality requirement on this matrix has been relaxed, the matrix now must merely be invertible.
rotation :: matrix
Defines a 3x3 matrix, in row-major format. For example, the identity matrix / null rotation can be defined like this:
<rotation>
<matrix> 1 0 0 0 1 0 0 0 1 </matrix>
</rotation> type:real 3x3 matrix
units: dimensionless
restrictions:Must be invertible.**
mesh_name
Name of a mesh object already defined in the scene file.
type:string**
emission_scale
Scales the amount of light emitted by a certain material as applied to the current model, according to one of several different photometric measures.
Element status: optional.
emission_scale::material_name
The name of a material.
type: string
emission_scale::measure
The following table gives the acceptable values for measure, in the name column:
type:string**
emission_scale::value
Defines the value of the corresponding measure.
type:real scalar**
units:dependent on the measure**
restrictions: > 0
ies_profile
If this element is present, then a directional distribution of light will be emitted from the given material as applied to the current model mesh.
The directional distribution is loaded from a file satisfying the ANSI/IESNA LM-63-2002 data system (IES) for describing photometric light distributions.
If the ies_profile is present, then the spectral radiance of the emission spectrum will be scaled so that the light emits a luminous flux as defined in the IES file.
When using an IES profile, each triangle of the mesh with the given material applied will emit light with a directional distibution determined by the IES data, using the normal of the triangle as the ‘principle direction’. So you can make the triangle face in any direction and it will work just fine.
When modelling a meshlight that will be used as an IES emitter, make sure it is completely flat, so that all triangle normals are the same.
Only IES files of photometric type ‘C’ are supported.
Only IES files with vertical angles starting at 0 degrees and ending at 90 degrees are supported.
element_status: optional
ies_profile :: material_name
Name of the material which should emit light according to the IES profile.
type:string**
ies_profile :: path
Path to the IES file. Can be absolute or relative. If relative, the path is taken as relative to the scene base directory.
type:string**
xml example:
<model>
<rotation>
<matrix>
1 0 0 0 0 -1 0 1 0
</matrix>
</rotation>
<pos>0 0 0</pos>
<scale>1</scale>
<mesh_name>hand</mesh_name>
<material_name>mat1</material_name>
<emission_scale>
<measure>luminous_flux</measure>
<value>100000</value>
</emission_scale>
</model>sphere
sphere :: center
type:real 3-vector
units:meters
restrictions:
sphere :: radius
type: real scalar
units:meters
restrictions: > 0
sphere :: material_name
type:string
restrictions:must be the name of an already specified material.
Include
The include element allows a different .igs file to be loaded and processed during the processing of the main .igs file.
include :: pathname
Path to another .igs file to be processed. Path is absolute or taken as relative to the current scene file directory.
type: string
units:
restrictions:
Indigo Shader Language Reference
Built-in types
real
A real, scalar number, stored as a floating-point number.
int
A 32-bit signed integer
bool
A boolean value.
vec2
A real 2-vector.
vec3
A real 3-vector.
mat2x2
A 2 x 2 real matrix.
mat3x3
A 3 x 3 real matrix.
Literal values
Real literal values, integer and boolean literal values can be written with the syntax from C++, e.g. ‘-1.56e4’, ‘4564’, ‘true’.
Function Definitions
Functions are defined like so:
def myfunc(vec3 pos) vec3 :
fbm(pos, 10),
sin(mul(doti(getTexCoords(0)), 100.0)),
sin(mul(dotj(getTexCoords(0)), 100.0))
)The def keyword starts a function definition. Next is the name of the function, then the list of arguments to the function, where each argument name is preceeded by the argument type. Then the return type of the function follows. After the colon, the body of the function is defined.
Built-in functions – Conditional functions
if(bool p, int a, int b) int
if(bool p, real a, real b) real
…
If p is true, returns a, otherwise returns b.
Built-in functions – Comparison functions
eq(int a, int b) bool
eq(real a, real b) bool
…
Returns true if a = b, false otherwise.
neq(int a, int b) bool
neq(real a, real b) bool
…
Returns false if a = b, true otherwise.
lt(int a, int b) bool**
lt(real a, real b) bool**
Returns a < b.
lte(int a, int b) bool
lte(real a, real b) bool
Returns a <= b.
gt(int a, int b) bool**
gt(real a, real b) bool**
Returns a > b.
gte(int a, int b) bool**
gte(real a, real b) bool**
Returns a >= b.
Built-in functions – Boolean functions
not(bool a) bool
Returns ~a.
or(bool a, bool b) bool
Returns a v b.
and(bool a, bool b) bool
Returns a ^ b.
xor(bool a, bool b) bool**
Returns a XOR b.
Built-in functions – Maths utility functions
add(real x, real y) real
add(int x, int y) int
add(vec2 x, vec2 y) vec2
add(vec3 x, vec3 y) vec3
Returns x + y.
sub(real x, real y) real
sub(int x, int y) int
sub(vec2 x, vec2 y) vec2
sub(vec3 x, vec3 y) vec3
Returns x – y.
mul(real x, real y) real
mul(int x, int y) int
Returns x * y.
div(real x, real y) real
div(int x, int y) int
Returns x / y.
mod(real x, real y) real
mod(int x, int y) int
Returns the remainder of x / y.
sin(real x) real
Returns sin(x).
asin(real x) real
Returns sin-1(x).
cos(real x) real
Returns cos(x).
acos(real x) real
Returns cos-1(x).
tan(real x) real
Returns tan(x).
atan(real x) real
Returns tan-1(x).
abs(real x) real
abs(int x) int
Returns the absolute value of x.
exp(real x) real
Returns ex.
pow(real x, real y) real
Returns xy.
sqrt(real x) real
Returns x1/2.
log(real x) real
Returns the natural logarithm of x, ln(x).
floor(real x) real
Returns the largest integer y, such that x >= y.
ceil(real x) real
Returns the smallest integer y, such that x <= y.
fract(real x) real
Returns x – floor(x).
floorToInt(real x) int
Returns floor(x) converted to an integer.
ceilToInt(real x) int
Returns ceil(x) converted to an integer.
real(int x) real
Converts x to type real.
min(int x, int y) int
min(real x, real y) real
min(vec2 x, vec2 y) vec2
min(vec3 x, vec3 y) vec3
If x < y, returns x, otherwise returns y.
In the case of vec2 or vec3 arguments, the comparison is done component-wise.
max(int x, int y) int
max(real x, real y) real
max(vec2 x, vec2 y) vec2
max(vec3 x, vec3 y) vec3
If x > y, returns x, otherwise returns y.
In the case of vec2 or vec3 arguments, the comparision is done component-wise.
lerp(real x, real y, real t) real
lerp(vec2 x, vec2 y, real t) vec2
lerp(vec3 x, vec3 y, real t) vec3
Returns x * (1 – t) + y * t
clamp(int x, int minval, int maxval) int
clamp(real x, real minval, real maxval) real
clamp(vec2 x, vec2 minval, vec2 maxval) vec2.
clamp(vec3 x, vec3 minval, vec3 maxval) vec3
Returns max(minval, min(maxval, x)).
In the case of vec2 or vec3 arguments, the clamping is done component-wise.
Undefined if minval > maxval.
Built-in functions – Vector constructors
vec2(real x, real y) vec2
Returns the 2-vector (x, y).
vec2(real x) vec2
Returns the 2-vector (x, x).
vec3(real x, real y, real z) vec3
Returns the 3-vector (x, y, z).
vec3(real x) vec3
Returns the 3-vector (x, x, x).
Built-in functions – Vector functions
dot(vec2 a, vec2 b) real
dot(vec3 a, vec3 b) real
Returns the dot product of a and b.
cross(vec3 a, vec3 b) vec3
Returns the cross product of a and b.
neg(vec3 a) vec3
Returns -a.
length(vec2 a) real
length(vec3 a) real
Returns the length of a, ||a||.
normalise(vec3 a) vec3
Returns a / ||a||
doti(vec3 a) real
Returns i.a, where** i** is the standard basis vector (1,0,0)
dotj(vec3 a) real
Returns j.a, where** j** is the standard basis vector (0,1,0)
dotk(vec3 a) real
Returns k.a, where** k** is the standard basis vector (0,0,1)
doti(vec2 a) real
Returns i.a, where** i** is the standard basis vector (1,0)
dotj(vec2 a) real
Returns j.a, where** j** is the standard basis vector (0,1)
mul(vec2 a, real b) vec2
mul(vec3 a, real b) vec3
Built-in functions – Matrix constructors
mat2x2(real e11, real e12, real e21, real e22) mat2x2
Returns the 2 x 2 matrix
e11 e12
e21 e22
mat3x3(real e11, real e12, real e13, real e21, real e22, real e23, real e31, real e32, real e33) mat3x3
Returns the 3 x 3 matrix
e11 e12 e13
e21 e22 e23
e31 e32 e33
Built-in functions – Matrix operations
mul(mat2x2 A, mat2x2 B) mat2x2
Returns the 2 x 2 matrix AB.
mul(mat3x3 A, mat3x3 B) mat3x3
Returns the 3 x 3 matrix AB.
mul(mat2x2 A, vec2 b) vec2
Returns the 2-vector (2 x 1 matrix) Ab.
mul(mat3x3 A, vec3 b) vec3
Returns the 3-vector (3 x 1 matrix) Ab.
transpose(mat2x2 A) mat2x2
transpose(mat3x3 A) mat3x3
Returns the transpose of A.
inverse(mat2x2 A) mat2x2
inverse(mat3x3 A) mat3x3
Returns the inverse of A. Undefined if A is not invertible.
Built-in functions – procedural noise functions
noise(real x) real
Returns 1-D Perlin noise evaluated at x.
noise(vec2 x) real
Returns 2-D Perlin noise evaluated at x.
noise(vec3 x) real
Returns 3-D Perlin noise evaluated at x.
fbm(real x, int oc) real
Returns oc octaves of 1-D Fractal Brownian Motion noise evaluated at x.
fbm(vec2 x, int oc) real
Returns oc octaves of 2-D Fractal Brownian Motion noise evaluated at x.
fbm(vec3 x, int oc) real
Returns oc octaves of 3-D Fractal Brownian Motion noise evaluated at x.
Built-in functions – texture sampling functions
getTexCoords(int texcoord_set_index) vec2
Gets the i-th texture coordinates at the shading point, where i = texcoord_set_index.
sample2DTextureVec3(int texture_index, vec2 st) vec3
Samples the i-th texture defined in the current material, where i = texture_index is a 0-based index, at the normalised coordinates (s, t). Returns a (R, G, B) triplet, where each component will be in the range 0, 1.
Built-in functions – debugging functions
print(real x) real
print(int x) int
Prints the value of x to standard output, then returns it. Note that the print function is not guaranteed to execute in any particular order.